相较于华为而言,理想汽车在智驾领域的宣发显得低调许多,只是一次次地向用户推送最新的智驾OTA升级包,不断迭代优化各项智驾功能。
不过,这并不代表理想的智驾系统上不了台面,反而是秀外慧中般的存在。等到本月底理想汽车向全量用户推送OTA 6.5升级包后,车主朋友就能直观体验到理想AD MAX车型真正的智驾实力。
近日,笔者参加了理想端到端+VLM智能驾驶体验活动,实车感受到了理想最新、最强的智驾能力。从个人主观感受而言,与华为乾崑智驾ADS 3.0系统、小鹏XNGP智驾相比,理想的智驾系统也是不遑多让,至少能够提前预定一个智驾第一梯队的名额。

理想首创端到端+VLM技术架构 智驾系统会看、会想、会开
笔者此次体验的车型是理想L6 AD MAX,配备最新内测版本的车位到车位的端到端+VLM智驾系统。
在开始说智驾之前,有必要介绍一下理想的端到端+VLM技术架构。
不少网友也是在今年开始,频繁听到端到端智驾系统,各家车企也都陆续“端了起来”,什么是端到端呢,简而言之,就是智驾系统的大脑处理系统。
之前的智驾系统普遍都是规则式,厂商根据不同的路况、场景针对性的写各种算法,通过算法制定出车辆行驶行为。但有限的算法代码,始终不能完全覆盖无限的道路场景,这就是规则式智驾的最大Bug。
并且,智驾系统中还有多个规则模型的存在,分别对应智驾系统的感知系统、决策系统、执行系统等,相互间的信息传递存在差异和延时性较高。
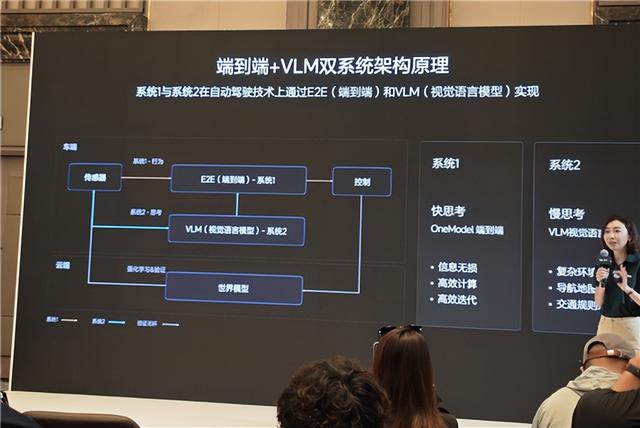
而理想汽车首发采用的一段式端到端智驾模型,就是将此前智驾所有的规则模型整合进一个大模型中,通过车主的优质驾驶数据训练学习,从车辆传感器接收到路况信息后,只经过一次GPU的推理计算,无需依靠任何规则式算法,直接通过端到端大模型输出智驾路线,除了效率更高之外,智驾路线也更聪明和拟人化。
至于VLM(视觉语言大模型),相当于为理想的端到端智驾,在应对特殊高上限场景时,又添加了一双眼睛。
VLM可通过车身的相机图像及导航地图信息进行视觉信息编码,由VLM模型进行推理,可让车辆理解周围路况信息的特殊意义和规定,决策行驶轨迹。

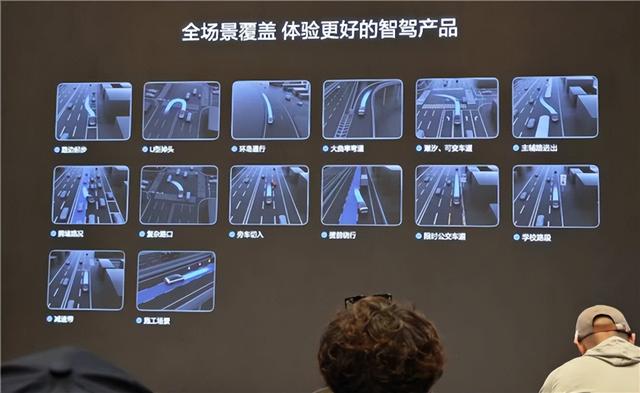
例如,当前公交车道规定了可通行时间,并在路边悬挂有通行时间的提示牌。没有VLM模型加持的智驾系统,无法理解公交车道的通行规则,只能避开公交车道;
而理想智驾在VLM系统支持下,能够根据路牌信息,推理当前是否处于允许通行时间,继而决定智驾系统是否在公交车道上通行。
以上只是一个小场景,再比如,VLM模型还能应对学校区域、潮汐/可变车道、路边施工信息及道路坑洼等的提示,让智驾系统的上限更高。
总的来看,理想这套端到端智驾系统,配合VLM模型,相当于让智驾系统能够像老司机一般拟人化驾驶,并且会看、会想、会开。
体验真车位到车位智驾 高速收费站、U形掉头、环岛全程不接管
笔者此次体验的试驾路线,也相当具有代表性,从地下车库车位上双拨挡杆开启智驾后,全程无需接管,路线上包含有驶出停车场闸机、无保护左转、U形掉头、市区人车混行路段、进出高速收费站、多路口环岛、目的地车位泊车等经典场景。在理想此次试驾之前,好像还没有车企能够全程不接管通过这些路段。

在出停车场闸机时,理想智驾系统自动跟在前车后方依此通行,VLM视觉模型检测到闸机栏杆,等到抬杆后,车辆自动驶出闸机行驶,如果栏杆一直未抬,车辆不会闯杆通行,与人类司机几乎无异。

来到掉头路段,车辆也无需干涉,检测到左转绿灯后,车辆跟随前车掉头,会对来往的机动车和非机动车进行避让,掉头全程无需接管。

期间,在市区路段还碰到一起交通事故,理想智驾检测到后方摆放的三角牌后,顺其自然向右侧变道,也未对右方的车辆形成干扰,整个过程相当丝滑。

而在经过高速收费站时,智驾系统结合VLM视觉模型,能够提前检测到ETC车道,车辆自动选择ETC车道通行。在经停闸机栏杆时,VLM视觉模型还会给出栏杆落下、抬起状态的文字信息,让你理解车辆智驾的行驶意图。

至于目前许多车企智驾系统仍未攻克的环岛行驶,理想的端到端智驾应对的也是极为轻松,车辆实施感知四个方向的来车,在临近出口时提前打灯变道,同样无需接管通过环岛路段。

最终,车辆行驶至目的地车位后,因为已经提前录入目标车位,车辆导航完成后,自动开启了目的地泊车,随着车辆泊入车位,此次的智驾体验路线也全程零接管完成。
和华为、小鹏等智驾系统相比,理想这套端到端+VLM智驾系统,完全能够同列第一梯队。而在零接管通过闸机、高速ETC收费站方面,理想还有明显的领先优势。
One More Thing
这次的智驾体验路线目的地是广州中汽研检验中心,理想汽车此次包场测试,还带来了即将为车主推送的全速域无上限激活的AEB紧急制动和全自动紧急转向AES功能。
理想全行业首发的全自动紧急转向AES功能,与其他品牌的AES需驾驶员手动掰一下方向盘才能激活不同,理想AES功能在检测到前方道路突然出现障碍物后,系统会自动判断相邻车道的可行性。
无需驾驶员确认,就能自动紧急变道,躲避前方车道障碍物或者车辆,比其它品牌的AES反应更及时、迅速。

场地实测中,在130km/h速度下进行“消失的前车”测试,理想AES检测到刹车不足以避免追尾事故后,自动紧急向左侧车道变道,只感觉车身晃动一下,就高速避开了前方停放的测试车辆。
对于车主而言,实际驾车场景下,理想全自动紧急转向AES功能,能够避免大部分有“消失的前车”、对向车场景、夜间静止车等追尾事故。
客观而言,此次智驾体验的路线,代表着大多数车主日常通勤的实际路况,而理想的这套端到端+VLM智驾系统,除了零接管和车位到车位不断点外,整体的实际智驾体验也相当在线。
按照理想方面的规划,本月底就将为AD MAX车主全量推送包含这套智驾系统和无上限速度激活的AEB、全自动紧急转向AES在内的OTA 6.5系统。届时,理想AD MAX车主,可对此做出真实、客观的评价,看看同属行业第一梯队的理想智驾到底有无水分。